Product
CRP welding/handling experts start with welding,
not just welding
not just welding




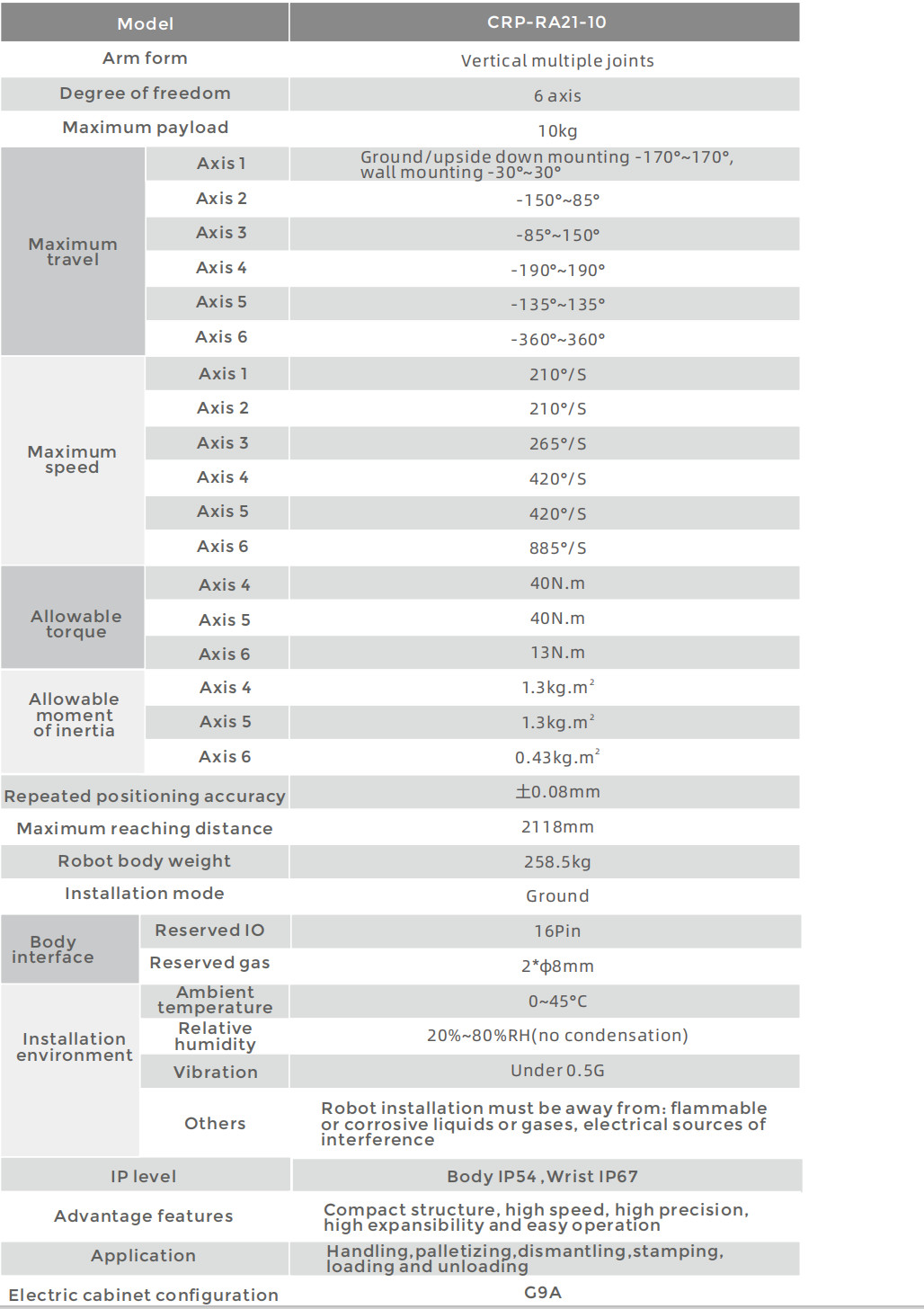
The overall structure of the robot is highly compact, light weight, more lightweight and applicable, especially the wrist is smaller to meet more scenes.
The robot has high rigidity, high speed motor and faster beat.
The robot motor adopts a sealed design with a protection level of up to IP67 to adapt to harsher application environments.
J2J3J4 shaft are reserved for installation holes, easy to install and fix the solenoid valve and other accessories. The J3 axis position provides the user IO interface and the dual - circuit gas pipe, which is more suitable for handling applications.
Drive with new PID control, forward - looking technology, fast response; Observer dynamic compensation, weak magnetic function, better motor control, more stable, higher speed.
New control algorithm, combining kinematics and dynamics. The new design, drive algorithm and control algorithm are integrated, according to the characteristics of mechanical parts and load conditions, automatic planning is realized, and the robot works at the maximum capacity allowed while ensuring the mechanical life, the robot has a longer life, the robot realizes high - speed response, faster running speed, more flexible and more stable, and the working beat is faster.
It has collision detection function, better protection of robot body and peripheral equipment, gravity compensation function, higher robot accuracy, to meet the higher accuracy of the scene application, and expand the application scenario.
The safety emergency stop board independent from the control system is configured, and the forced disconnecting relay is adopted to provide double - circuit emergency stop to ensure the reliability of emergency stop.
Built - in three - phase filter to effectively isolate external interference and prevent internal interference output.